在工业自动化、航空航天、机器人控制等领域,系统控制的核心技术无处不在。其中,PFD(故障安全冗余显示系统)和PID(比例积分微分调节器)是两种截然不同的技术,它们在功能、原理和应用领域上有显著的差异。本文将深入解析PFD和PID的区别,帮助读者更好地理解这两种技术在现代系统控制中的独特角色。
PFD,即故障安全冗余显示系统,是一种用于显示工业设备或系统故障信息的智能化装置。它的核心功能是通过冗余显示技术,实时监测设备状态并以直观的形式展示关键信息。PFD通常集成多种传感器和数据处理技术,能够自动识别故障并发出警报,从而确保系统的安全运行。
工业自动化:PFD用于监控生产线的运行状态,及时发现设备故障,避免停机或事故的发生。
航空航天:PFD被用作飞机或卫星的故障监测系统,确保设备在极端环境下的正常运行。
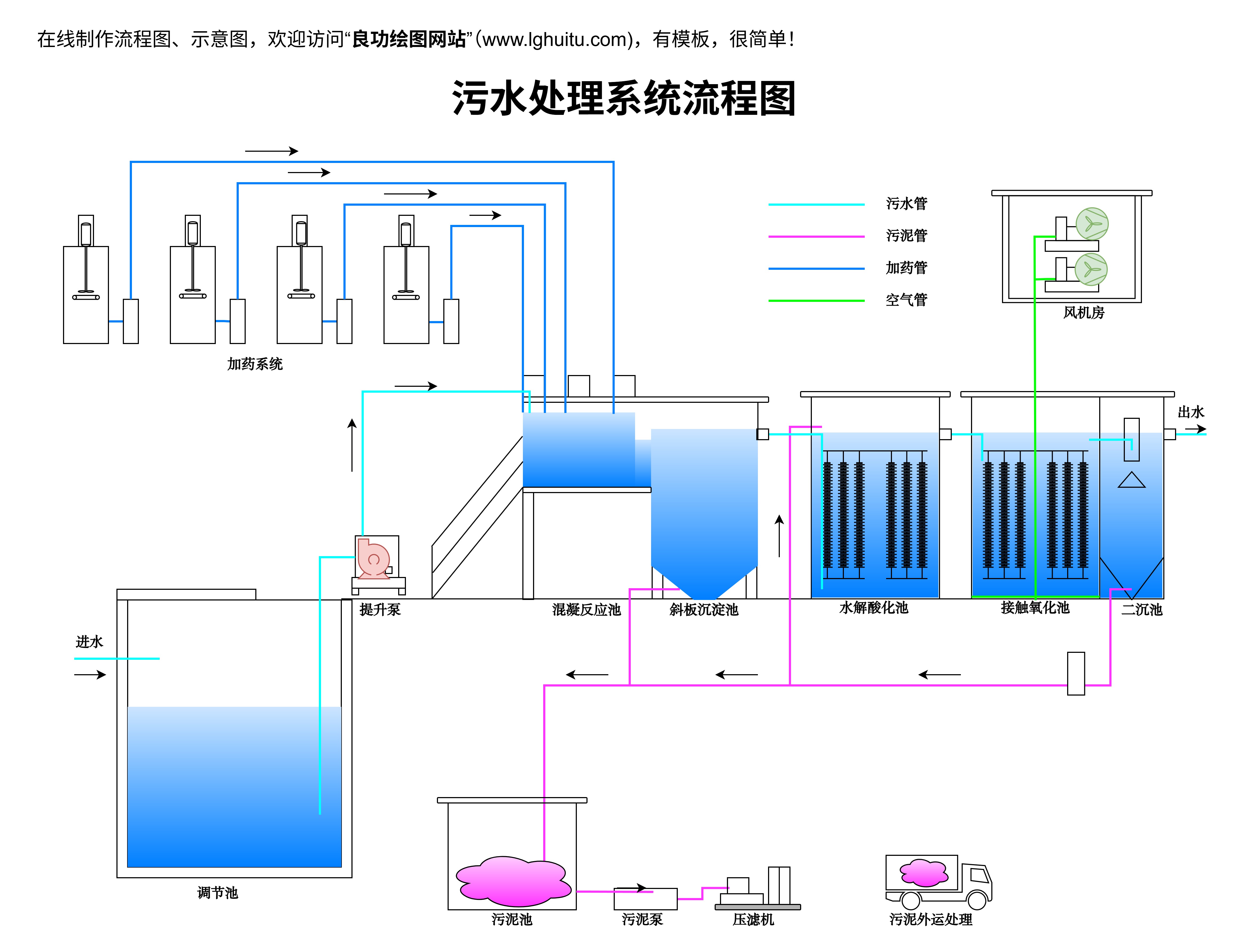
**ProcessControl**:在化工、石油等行业,PFD用于实时显示生产过程中的关键参数,如压力、温度等,帮助操作人员做出快速决策。
PFD的另一个显著特点是其高可靠性和智能化。通过冗余设计,PFD能够在单个传感器故障时仍能正常工作,确保系统的连续性和安全性。
PID,即比例积分微分调节器,是控制理论中一种经典的反馈调节方法。它的核心思想是根据系统的偏差(即实际输出与期望值的差异),通过比例、积分和微分三个环节的计算,来调整系统的输出,从而实现对系统行为的精确控制。
微分环节:预测系统的未来行为,并调整当前的输出,以加快系统的响应速度。
机器人技术:在机器人运动控制中,PID调节器能够帮助机器人实现精确的轨迹跟踪和稳定的操作。
3.(此处可能需要更正,因为机器人中更多用PID)
无人机控制:PID调节器被用作无人机的姿态控制和飞行轨迹调节。
PID调节器的优势在于其简单性和通用性,能够适应多种复杂系统的需求。由于其参数调节的复杂性,PID调节器在应用中需要注意参数的优化,以确保系统的稳定性和响应速度。
通过以上分析可以看出,PFD和PID虽然都是控制系统中的重要技术,但它们在功能、应用和实现原理上有显著的不同。PFD侧重于故障监测和显示,而PID则侧重于动态调节和控制。了解这两种技术的差异,有助于我们更好地选择合适的技术来解决实际问题。无论是工业自动化还是机器人控制,PFD和PID都发挥着不可或缺的作用。